Drones Aplicados a la Agricultura de Precisión
Drones aPPlieD to Precision agriculture
1Adrián González, 2Gelberth Amarillo, 3Milton Amarillo, 4Francisco Sarmiento
1,2Universidad de Cundinamarca, 3Universidad Nacional Abierta y a Distancia, 4Universidad Distrital Francisco José de Caldas, Bogotá, Colombia
1aalejandrogonzalez@mail.unicundi.edu.co 2gamarillo@mail.unicundi.edu.co 3milton.amarillo@unad.edu.co 4fjsarmiento@correo.udistrital.edu.co
Resumen
El siguiente artículo presenta los drones como una tecnología que ayuda a los múltiples procesos de la agricultura, a captar información importante y a evaluar las condiciones de los terrenos monitoreados, gra- cias a sus grandes ventajas para sobrevolar los campos y los cultivos. Ahora no es completamente necesa- rio recorrer todo el cultivo personalmente para detectar los problemas que sufre este, ya que con los drones el procedimiento de evaluar los cultivos se puede hacer de forma virtual, aplicando tecnologías de cámaras con alta definición e información georreferenciada para su ubicación exacta. Lo más importante es el poder determinar de forma prematura y eficiente las enfermedades, las plagas, la maleza y los posibles efectos futuros de daños climáticos como las heladas o sequías. La eficiencia, tanto ambiental como económica, ayuda en los procesos de siembra, costos de riego, abono y fumigación.
Palabras claves: agricultura de precisión, cultivos, drones, imágenes multiespectrales, ingeniería agronómica, prevención de plagas, tecnología.
Abstract
the following article presents the drones as a technology that helps the multiple processes of agricul- ture, to capture important information and to assess the conditions of the land being monitored, thanks to their great advantages for flying over the fields and crops. now it is not absolutely necessary to traverse the whole crop personally to detect the problems that it suffers, since with drones the procedure to evaluate the crops can be done in a virtual way, applying technologies of cameras with high definition and information georeferenced for its exact location. the most important thing is to determine early and efficiently diseases, pests, weeds and possible future effects of climate damage such as frost or drought. the efficiency, both environmental and economic, help in the process of planting, and irrigation, fertilizer and fumigation costs.
Keywords:agronomic enginieering, crops, drones, multiespectral images, precisión agriculture, pest prevention, technology.
I. Introducción
Actualmente, la agricultura en todo el mundo propende por la seguridad alimentaria a futuro, razón por la cual se está en la búsqueda de tecnologías mo- dernas que ayuden a mitigar la falta de atención de ciertas particularidades de los cultivos que generan gastos innecesarios en el monitoreo de los mismos. Anteriormente, las fincas no tenían una gran área y, por ende, los cultivos en estas no eran muy grandes (además de otros factores que afectan a la sociedad actual: tiempo), por lo que no era tan difícil recorrerlas completamente. No obstante, hoy en día, la deman- da de alimentos necesita de cultivos más extensos, que se vuelven demasiado grandes para poderlos administrar perfectamente como se hacía antes. Esta problemática genera que las personas no puedan co- nocer de manera puntual los cultivos que manejan y tomen decisiones generalizadas de manera errónea, para ciertas áreas, que a corto y mediano plazo trae- rán como resultado pérdidas en gastos superfluos y un mayor impacto ambiental en sus cultivos.
Se evidencia que a partir de los drones, vistos como una herramienta tecnológica innovadora, es posible resolver las problemáticas expuestas en campos de cultivos de gran extensión, ya que con cámaras de alta definición e información geográfi- ca pueden recorrer más de mil hectáreas en menos de una hora [1]. Estos dispositivos para la toma de mediciones y captura remota que sobrevuelan los cultivos con cámaras multiespectrales pueden tomar fotografías y grabar videos de alta resolución que de- tectan características que se pasan por alto a simple vista [2], ayudando a respaldar las decisiones para una mejor precisión y productividad del campo.
II. Desarrollo de contenido
A. Agricultura de precisión
La agricultura de precisión se basa en el manejo específico de un área de cultivo. Para ello, se utili- zan herramientas tecnológicas como el posiciona- miento global, dispositivos de distribución de riego, fertilizantes y plaguicidas variables, sensores climatológicos de cultivo y, últimamente, los drones [3]. Estas herramientas en conjunto realizan el proceso de recolección de la información la cual es finalmen- te plasmada en mapas digitales sobre los cuales se toman decisiones de manejo [4].
Para [5], el uso de la agricultura de precisión está supeditado a los beneficios económicos y defi- ne tres criterios para que esto se cumpla:
Que las causas de la variabilidad puedan ser identificadas
Que la información obtenida pueda ser usada para mejorar las prácticas de manejo del cultivo y mejorar la productividad.
La agricultura de precisión tiene como herramientas: el uso de tecnologías de posicionamiento global satelital (GPS), sensores láser en tierra para medir el nivel del terreno e imágenes aéreas para evaluar las diferentes variables de cada determinada par- cela y, claro está, el país debe contar con un buen sistema de información geográfica [6].
Los mapas de producción [7] son de gran importancia para la agricultura de precisión. Estos se ge- neran a partir de herramientas tecnológicas y diver- sos métodos gracias a los cuales es posible definir las áreas del cultivo que presentan una adecuada producción y, así mismo, detectar cuáles áreas re- quieren análisis especial y dónde deben aplicarse correctivos en busca del objetivo deseado.
Para entender el estado de la vegetación en general, se utilizan los índices de vegetación [8], apli- cando las operaciones algebraicas entre las ban- das de la imagen tratada; esta puede ser tomada por medio de un dron, un avión o un satélite, dando como resultado destacar algunas características como la vegetación, el suelo, la radiación solar y la humedad, entre otras, y determinar los parámetros de la cobertura vegetal por medio de los pixeles [9].
B. Drones y teledetección agrícola
Cada vez son más los agricultores que confían en la agricultura de precisión y en la implementación de los drones gracias a sus capacidades de captar grandes cantidades de información de sus cultivos de manera precisa y ayudar a la toma de decisiones; la teledetección agrícola, entonces, permite obtener información de la vegetación sin necesidad de estar en contacto directo con ella.
En la agricultura de precisión por medio de drones se captan imágenes originadas por cámaras hiperespectrales que capturan información del espectro electromagnético incluido el espectro visible con frecuencias de cada banda muy pequeños, las cámaras multiespectrales que pueden obtener el RGB más cualquier otra banda con información adi- cional a parte de la visible; las cámaras infrarrojas o térmicas se usan para obtener las diferentes ban- das del espectro [10], que con una oportuna implementación permiten adquirir los datos con los que se generan las valoraciones de los cultivos tratados y, de esta forma, prestar una adecuada atención de manera puntual y localizada a los cultivos. En cam- bio, en la agricultura convencional, se aplican de manera uniforme los insumos o fertilizantes para la prevención de enfermedades sin tener en cuenta la variabilidad espacial de los diversos factores impli- cados en el buen desarrollo de los cultivos; en otras palabras, no se presta una adecuada atención y se generan gastos innecesarios [11].
Mediante las imágenes tomadas con los drones se pueden generar diagnósticos que permiten diversas operaciones, tales como, gestiones hídricas, fertilización, detección de enfermedades y cosechas selectivas, que, a su vez, dan paso a la producción de mapas agronómicos los cuales representan claramente los problemas y los avances de los cultivos.
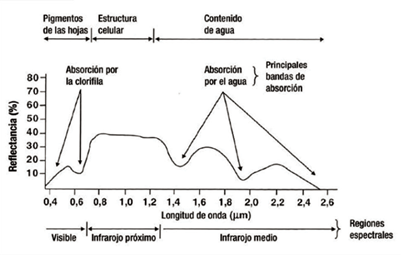
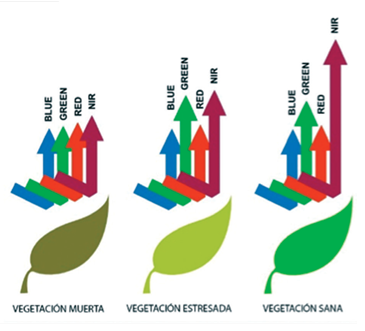
El índice diferencial de vegetación normalizado (NDVI) se utiliza para estimar la cantidad, calidad y desarrollo de la vegetación, con base en la medi- ción de la intensidad de la radiación que la vegeta- ción refleja y que se puede observar por medio de las bandas del espectro electromagnético [12], tal como se muestra en la Fig. 1.
Fig. 1 Reflactancia de las bandas según la vegetación. [12]
El NDVI se utiliza en todo el mundo para hacer un seguimiento de las sequías, supervisar y predecir la producción agrícola, ayudar en la predicción de las zonas con riesgo de incendio y cartografiar la desertización. El NDVI es muy utilizado en el seguimiento de la vegetación global porque ayuda a compensar los cambios en las condiciones de iluminación, la pendiente de la superficie, la orientación y otros factores extraños [13].
La agrupación de REM (Radiación Electromagnética [14]) con iguales características recibe el nombre de banda o segmento. Para la adquisición remota, las principales bandas de interés son la visible, la infrarroja (IR) y las microondas. La amplia banda IR puede además dividirse en IR cercano (NIR), IR medio (MIR) e IR lejano (FIR) o térmico. De esa forma, se puede determinar el estado de la vegetación y los cultivos, Fig. 2, [15].
Fig. 2 Radiación Electromagnética. [16]
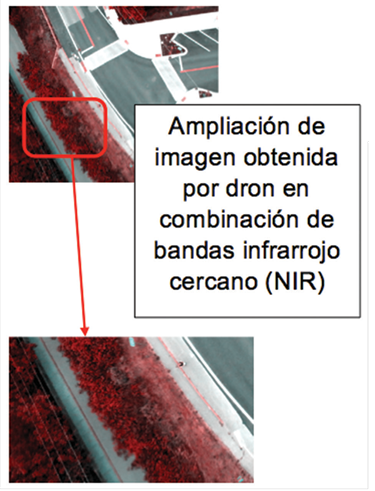
En el mosaico que se muestra en la Fig. 3, realizado a partir de imágenes obtenidas por drones y procesadas para observar la banda NIR, se puede diferenciar claramente la vegetación en color rojo, y la variación entre el césped, los arbustos y los árboles, incluyendo cultivos y arados [17].
Fig. 3 Imagen en combinación de bandas infrarrojo cercano (NIR) obtenida por drones, que muestra el tono de rojos en la vegetación.
C. Características de los drones para el sector agro
Los drones tienen como finalidad agilizar y ayudar en los diversos procesos, como la siembra apoyando en la identificación de terrenos fértiles y cómodos para el cultivo, en el desarrollo del cultivo monitoreando los cultivos identificando posibles riesgos y en la cosecha del cultivo identificando la producción final, desde las actividades que desempeñan actualmente, tales como, el aeromodelismo, trabajos en seguridad fiscal y vigilancia, hasta su uso en el sector de las geo ciencias y en el sector del agro [18], [19].
Para este sector específico se implementan drones con características especiales que permitan captar la información que el ser humano no puede ver a simple vista. Estas características son:
Cámara: existen diversos tipos de cámaras utilizadas en los drones para captar la información mediante las bandas del espectro electromagnético y realizar las estimaciones por medio del NDVI (Índice de Vegetación de Diferencia Normalizada).
Hay cámaras como las Canon en su versión S110 de 12 MPx que implementan el Dron eBee Ag con las siguientes características:
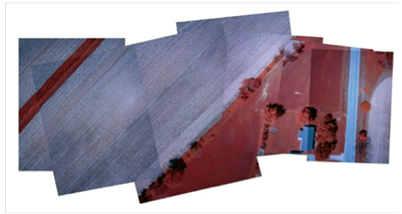
Estas cámaras permiten obtener fotografías con información precisa sobre la vegetación, como se observa en el mosaico generado en la Fig. 4.
Fig. 4 Mosaico de imágenes obtenidas por Drone.
Fuente: OpenDroneMap y El Autor.
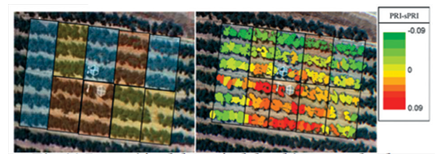
Otras características son los sensores multiespectrales de alta resolución como los sensores de Airinov o Parrot, cuya respuesta se asemeja a lo observado en la Fig. 5. Las características de este tipo de sensores son:
Fig. 5 Comparación de la imagen RGB, Infrarrojo y NDVI. [20]
Otros sensores multiespectrales de la marca Tetracam son:
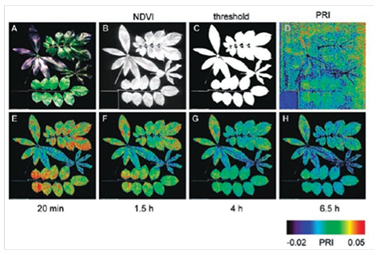
La Fig. 6 muestra el comportamiento particular de una vegetación específica en un periodo de tiempo determinado, mediante el uso de los sensores multiespectrales, software especializado y el análisis estadístico. Los pixeles se clasifican de acuerdo al nivel digital que presentan y se obtienen grandes grupos de pixeles que presentan niveles digitales parecidos; permitiendo la clasificación entre coberturas, o en el caso de la agricultura de precisión, las características de las plantas y las condiciones ambientales como el estrés por sequía [23], [24], [25].
Fig. 6 Procesamiento de Índice de reflactancia de cuatro hojas tropicales durante el proceso de secado. [23]
También están los sensores térmicos y radio rastreadores que ayudan a la precisión de los datos.
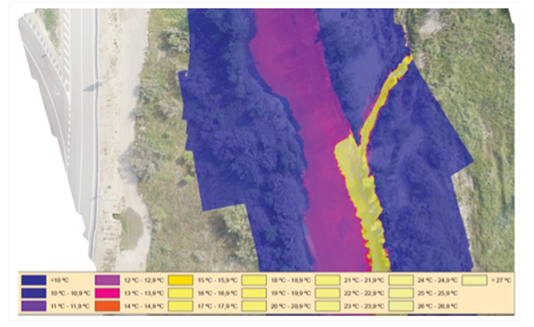
Gracias a este sensor se puede recopilar información de los cultivos y otras coberturas para comprobar la evolución de la temperatura del sector en estudio como se observa en la orto imagen térmica de la Fig. 7.
Fig. 7 Ortoimagen térmica de un río tomada por un Dron. [27]
Tal como se observa en la Fig. 8, a partir de estos sensores es posible identificar crecimienvegetación, y llegar a análisis estadísticos que permiten evaluar más apropiadamente los cultito celular relacionado con el crecimiento de la vos [27], [28].
Fig. 8 Índice de Crecimiento Vegetativo con SIG y Drone. [27]
III. Resultados y análisis
A. Metodología
Las metodologías aplicadas a la agricultura de precisión varían según las personas o las empresas que realizan los procedimientos; sin embargo, en general, todos los métodos tienen tres fases primordiales:
• Operación
• Posproceso
• Aplicación a los cultivos
Por medio de estas fases se desarrolla un proyecto de agricultura de precisión acorde con las necesidades de los cultivos y personas que los manejan, encontrando de manera eficiente las problemáticas que acechan a los cultivos y cómo prevenirlas.
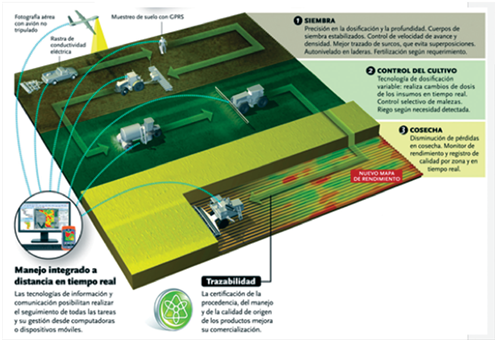
Fig. 9 Proceso de Agricultura de Precisión. [29]
1) Operación: en esta fase se realiza la monitorización del área seleccionada a través de la detección de las variables de importancia para el estudio; aquí también se planifica el vuelo y la obtención de imágenes de resolución óptima por cultivo.
Igualmente, se implementan los drones y los UAVs (unmanned Aerial Vehicles) para realizar los vuelos; preferiblemente se busca que sean autónomos y, de la misma forma, que recolecten datos e imágenes [30].
Para esta fase es importante tener definida la totalidad del área de estudio, con el fin de asignar las líneas de vuelo que cubran toda la zona por analizar, estimando, además, el tiempo de vuelo y la cantidad de información capturada, así como, los sensores y equipos más adecuados por utilizar, fig. 10.
Fig. 10 Software Mission Planer – Plan de Vuelo en el campo de futbol de la Universidad de Cundinamarca, sede Fusagasugá.
2) Posproceso: en esta etapa se realiza el tratamiento de las imágenes previamente obtenidas por el dron y se generan las imágenes NDVI térmicas y multiespectrales de la zona para valorar el estado de los cultivos; con esta información se procede a elaborar los mapas con los datos de importancia para los agricultores y así poder actuar con base en las decisiones tomadas.
Para la generación del NDVI es importante tener la imagen en color verdadero; es decir, el RGB en el que la banda del rojo es combinada con la banda infrarroja; donde el análisis esperado se trabajara con infrarrojo cercano, lejano o térmico y el resultado permite evaluar la salud de la vegetación planta por planta, hoja por hoja, de acuerdo con la resolución espacial, que es la equivalencia del tamaño de pixel en terreno que presente el sensor.
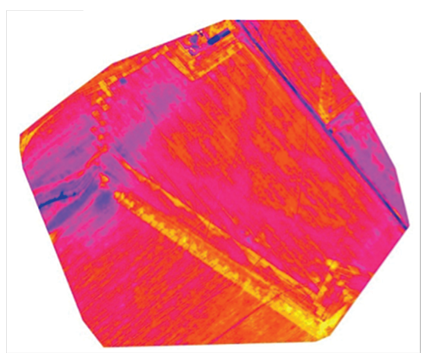
En la Fig. 11 se evidencia un modelo hipsométrico que varía en tonalidades de rojo a verde, teniendo una escala de alto a bajo.
Fig. 11 Detección del estrés del cultivo usando el Índice de Reflactancia Fotoquímica. [31].
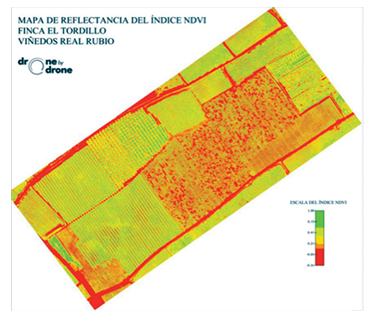
Del mismo modo, en la Fig. 12 se observa el comportamiento de la vegetación vs. el suelo desnudo, donde la vegetación resalta por su alta reflactancia en infrarrojo.
Fig. 12 Mapa de reflactancia del índice NDVI. [32].
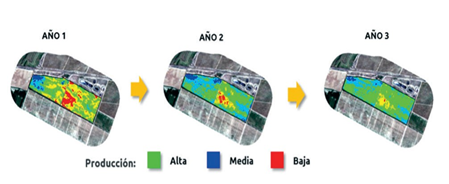
3) Aplicación a los cultivos: en esta última etapa se actúa teniendo en cuenta lo que se muestra en los mapas, los cuales sirven como ayuda para detectar los problemas que sufre la vegetación y los cultivos; así mismo, se determina la forma de actuar con base en la evaluación de la rentabilidad económica y medioambiental con la finalidad de que el área que se está tratando sea más productiva conforme a los años [33], tal como se identifica en la Fig. 13.
Fig. 13 Visualización y monitoreo de problemas relacionados con abono, riego, poda y crecimiento en un cultivo por tres años. [33]
B. Casos de estudio
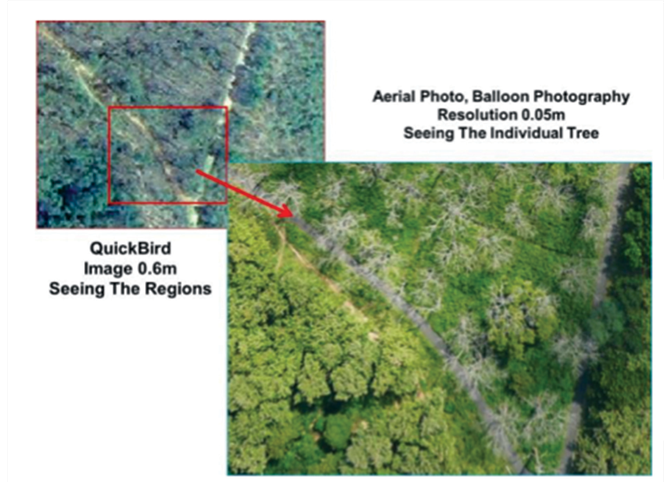
1) Importancia de la teledetección basada en vehículos aéreos no tripulados para apoyar la agricultura de precisión en Indonesia: hoy día, en el mercado de la información geográfica de Indonesia, la aplicación de la industria de la teledetección para apoyar la agricultura, la silvicultura y la acuicultura ha aumentado. En general, estas aplicaciones u órdenes se cumplen por imágenes satelitales aplicando técnicas de teledetección [34]. Lo anterior, debido al coste de producción y a la condición de infraestructuras limitadas en el campo. Por desgracia, muchos ven la industria de la teledetección de Indonesia solo como un agente de venta y no tienen ninguna plataforma de suministro de imágenes por sí mismo. Además, todavía no puede cumplir con algunas aplicaciones, como la supervisión de los árboles individuales o la alta resolución de las imágenes de satélite. Una de las ventajas de la fotografía aérea en comparación con las imágenes de satélite radica en que puede ser utilizada para observar cada estructura de los árboles individuales [35]. En la Fig. 14 se presenta la comparación en cuanto a resolución espacial entre una imagen QuickBird de 6 cm de resolución espacial, en contraste con la misma zona en una fotografía aérea de 5 mm de resolución espacial; ciertamente, en una de ellas es posible discriminar y categorizar lo elementos con mayor precisión.
Fig. 14 Comparación entre el satélite de alta resolución y fotografías aéreas en el bosque de madera de teca. [36]
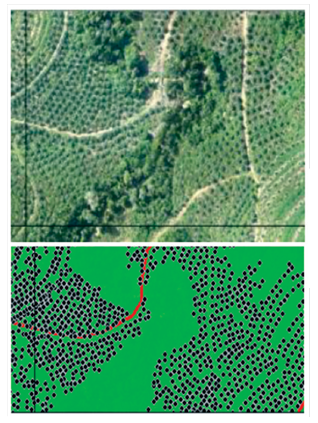
2) Aplicación en la plantación de palma de aceite: el caso de estudio se encuentra en la plantación de palma de aceite propiedad de PT Eka Jabontara en Berau de Kalimantan Oriental. El propósito de estas actividades de mapeo es apoyar el cálculo de soporte por hectárea (SPH) o de la palmera como individuo que se puede medir a partir de la imagen. En la Fig. 15 se muestra que el producto base puede ser una ortofoto, y la interpretación es posible llegando a la medición de árboles individuales [36].
Fig. 15 Ejemplos de productos de mapeo para árboles de conteo de aceite de palma. [36]
Algunas notas respecto de la cartografía de las plantaciones de palma de aceite que utiliza esta técnica son:
El trabajo aquí expuesto es de gran relevancia, puesto que da a conocer algunas experiencias prácticas sobre el uso de vehículos aéreos no tripulados (UAVs) como apoyo en el mapeo de agricultura de precisión efectiva [37]. La plataforma aérea lleva una cámara digital de bolsillo con la cual se obtienen las imágenes de sus sensores. Los dos productos básicos del sistema son de ortofotos y modelos digitales de elevación (punto de enturbiamiento 3D) con una precisión de hasta 2 pixeles de error para la posición horizontal y 5 pixeles de error para la vertical. A partir del producto orto foto que muestra información planimétrica, la superficie de la parcela y el diámetro de copa se pueden medir, mientras que desde el modelo 3D o de elevación digital el producto modelo puede ser interpretado para obtener información relacionada con las estructuras de vegetación o de árboles, tales como, la altura del árbol. Para el futuro, lo que se necesita es desarrollar la fórmula para encontrar la relación entre los parámetros estructurales de las plantas individuo (dosel, altura, densidad) que se pueden medir mediante este sistema con el repertorio potencial de la vegetación estudiada [36].
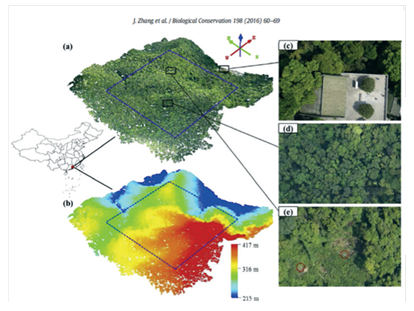
3) Probando el potencial de los drones como una herramienta para el monitoreo forestal a largo plazo: los datos de biodiversidad de alta calidad sobre las distribuciones de especies y su integración con las variables ambientales son fundamentales para abordar preguntas de investigación básica en ecología, para el seguimiento de cambios en la biodiversidad y para el desarrollo de acciones efectivas de conservación. A pesar de que se adquiere gran conocimiento por la cantidad de tiempo que se pasa en el campo, los estudios de campo tradicionales pueden ser agotadores y costosos [38] [39]. Por ejemplo, un equipo de campo de 12 a 14 individuos tomó 3 años para completar el primer censo de árboles de una dinámica forestal con parcelas de 50 hectáreas en la isla de Barro Colorado, Panamá. Los costos para establecer parcelas similares se estiman en alrededor de US$ 100.000 a US$ 500.000 [40]. Mediciones y seguimientos adicionales de la altura del árbol, la apertura del dosel, la perturbación del bosque y otros parámetros forestales están limitados por el trabajo humano disponible y por los recursos financieros. Este estudio se realizó en un bosque de 20 hectáreas (500 m × 400 m) parcela dinámica en la Reserva Natural Nacional (DHS) Dinghushan (23 ° 09’- 23 ° 11’N, 112 ° 30’-112 ° 33’E) en el sur de China, Fig. 16.
Fig. 16 Ubicación geográfica del área de estudio en la reserva natural nacional de Dinghushan, Sur de China. [42]
La reserva DHS, que fue establecida en 1956 como la primera reserva natural de China, abarca aproxima- damente 1,155 hectáreas de bosques con elevaciones que van de 14,1 m a los 1000.3 m sobre el nivel del mar. Esta reserva se unió a la Red Internacional de Reserva de la Biosfera y el Hombre (MAB) como pun- to mundial de acceso de conservación en 1979. La re- gión se caracteriza por un clima sur subtropical mon- zónico, con una temperatura media anual de 20,8° C, y temperaturas medias mensuales que oscilan entre 12,6° C en enero a 28° C en julio [41]. La precipitación media anual es de 1.929 mm, con más precipitación que se produce entre abril y septiembre. La media anual de la evaporación es de 1115 mm, con una hu- medad relativa promedio de 80% [41]. La vegetación está cubierta principalmente por hojas perennes del bosque latifoliado bien protegido del monzón. En con- traste con los bosques alterados circundantes, la re- serva contiene bosques primarios raros de por lo me- nos 400 años de edad que fueron conservados por los monjes en el templo budista cerca de la parcela [42].
Los componentes de la Fig. 16, son: (a) La fotografía aérea de nuestra área de estudio. Las líneas azules discontinuas representan el límite de 20-ha (400 m × 500 m) y la dinámica de la parcela del bosque. (b) El mapa de nube de puntos para el DSM de la región cubierta por el reconocimiento aéreo con el avión no tripulado. (c) Esta imagen muestra el templo budista utilizado para el despegue y el aterrizaje. (d) Acá se observa un área pequeña con cierre de dosel ocupado por múltiples especies, mientras que (e) ilustra una zona con dosel abierto. Los dos círculos rojos en (e) resaltan la ubicación de las dos trampas de semillas a nivel del suelo.
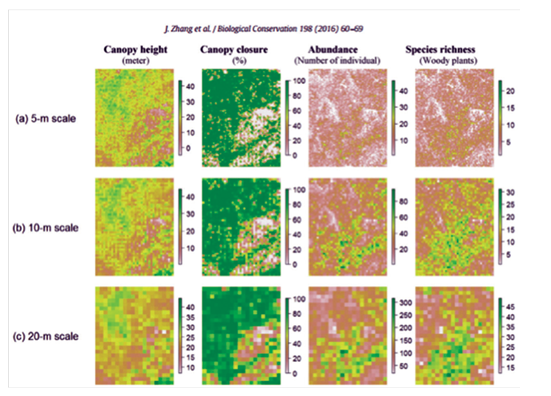
4) Estudio con un avión no tripulado – Dron: Se usa el pequeño Dron MD4-1000 de la marca Microdrones para reconocimiento aéreo de la parcela de 20 hectáreas. Este UAV pesa 2,65 kg, tiene una velocidad que cruza 12 m/s, la duración máxima de vuelo es de 88 min sin carga útil en condiciones meteorológicas óptimas y la masa de la carga útil máxima es de 1,2 kg. Este quadcopter o dron puede volar por control remoto o de forma autónoma con la ayuda de su receptor GPS y su sistema de navegación waypoint. Una cámara Sony NEX-5 de foto fija fue montada en la parte inferior del dron para lograr imágenes aéreas, Fig. 17. Un miembro del equipo utilizó este sistema durante más de 200 misiones exitosas que investigan los cambios de cobertura del suelo y la dinámica de la vegetación.
Fig. 17 Mapas de altura tomadas con un dron, derivado del dosel, el cierre y la abundancia de plantas leñosas y riqueza de especies generada a partir de los datos de inventario de la tierra en tres escalas especiales, 5m, 10m y 20m respectivamente. [42]
Las fotografías aéreas se procesan generando orto imágenes georreferenciadas, un modelo digital de superficie (DSM) y las nubes de puntos utilizando el software fotogramétrico ―Pix4dmapper‖, que ha sido ampliamente usado para la fotogrametría de los UAV. Sobre la base de las imágenes aéreas recogidas del dron, se seleccionaron nueve puntos de control terrestre (GCP) para la geo corrección de la nube de puntos [43]. Las ubicaciones XYZ de cada GCP se midieron usando un trimble GPS RTK (cinemática en tiempo real) a 1 m de precisión (UTM Zona 49 N, WGS84 datum horizontal) [42].
5) Dron ecológico y el seguimiento del ecosistema a largo plazo: se demuestra, a manera de ejemplo, cómo las variables derivadas de aviones no tripulados pueden contribuir a la comprensión de la biodiversidad y al mantenimiento de la coexistencia de especies para una amplia parcela de bosque subtropical. Claramente, los drones tienen un gran potencial para proporcionar avances en el mapeo y monitoreo de la dinámica del bosque. En comparación con las técnicas de teledetección satelitales y medios aéreos, los drones recogen los datos con una resolución espacial de ultra-alta (por ejemplo, cerca de 5 cm de nuestro estudio) de una manera rentable [44] [45], que pueden ser utilizados para medir algunos atributos soporte clave que se han demostrado por unos pocos ([46][47]) estudios recientes de drones en los ecosistemas forestales. El análisis también mostró que las imágenes de drone de la parcela de estudio coinciden muy bien con los puntos de referencia en tierra, con la precisión de 32-44 RMSE RMSE. Alta precisión entre las imá- genes y los drones de tierra también se informó en boreal [47] y los bosques templados [44] [45].
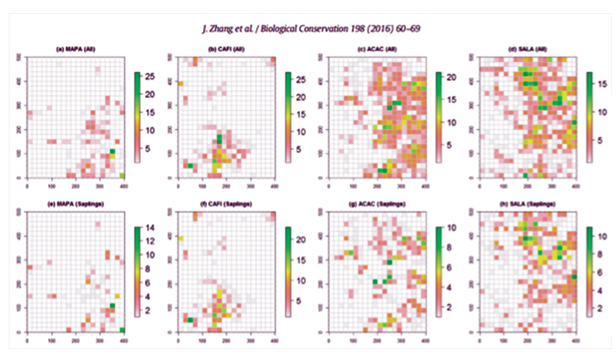
Fig. 18 Distribución espacial de abundancia de especies a 20 m. [42]
El uso de aviones no tripulados en este proyecto identificó varias advertencias y desafíos prácticos que deben tenerse en cuenta para futuros estudios. En primer lugar, los datos del terreno, recogidos del campo, pueden no coincidir espacialmente con el modelo digital de superficie (DSM) generado desde el dron. Siguiendo los protocolos estándar de la red CTFS-ForestGEO [40], casi todos los de más de 60 parcelas han tenido variables tráficas medidas en la escala de 20 m. Existen algunos errores de este enfoque, especialmente para las parcelas con grandes rangos de topografía. Aunque se seleccionaron 9 puntos de control en tierra para la geo corrección de la nube de puntos y los resultados mostraron una alta precisión de estos puntos de control, la estimación de los datos de la altura del dosel se afectó por los datos DEM en tierras relativamente gruesas (4,28 m de RMSE al interpolar a 1 escala -m). Esta preocupación también se ha aumentado en los últimos estudios de drones en los bosques de hoja caduca [44], [45] y los bosques tropicales [46]. A pesar de esta limitación, los análisis de este estudio en la escala de 20 m siguen mostrándose sólidos para explicar las variaciones de la biodiversidad en escala local y otros atributos soportados.
IV. Conclusiones y Trabajos Futuros
Las variables derivadas del dosel con drones, atributos de nivel/espera, variables topográficas y edáficas variaron en gran medida en las tres escalas espaciales. En la escala de 20 m, la riqueza de especies varió de 12 a 49 con soporte de área basal que varía de 5,5 m² ha-1 a 64,9 m² h-1. Para las variables de dosel con drones, la altura del dosel varió de 7,0 m a 44,3 m de densidad de fronda que varía de dosel abierto (0%) para cerrar completamente el dosel (100%) y un promedio general de 73,5%, se estima que con el dosel a una abertura aproximada del 70% es apropiada para cualquier vegetación sin importar la densidad, sin embargo la altura de dosel si es proporcional a la altura promedio de la vegetación. En la comparación de los patrones espaciales de estas variables en tres escalas, se detectó un patrón similar entre la altura del dosel y el cierre del dosel: los doseles altos y cercanos se encuentran en la esquina noroeste de la trama, mientras marquesinas bajas y abiertas están en la esquina sureste.
Es un hecho que a partir de drones se puede obtener la especialización de los elementos presentes en un área de interés definida; para el caso de fincas, son de gran ayuda para el análisis de cultivos y la toma de decisiones apropiadas y pertinentes para mejorar la productividad del sector agro. En caso de problemáticas en terreno, con el soporte de los drones se llega a soluciones integrales y de mayor efectividad.
Con la correcta utilización de imágenes multiespectrales obtenidas de dron, existe una aproximación a lo que sería una radiografía de los cultivos, identificando problemas que alteran el buen comportamiento de los mismos y que a simple vista no se ven; esto facilita una gestión inmediata, para apoyar de manera adecuada en la productividad de los cultivos, permitiendo también el uso de agroquímicos u otros insumos que aportan a su buen desarrollo, en el momento preciso. Un adecuado análisis de las imágenes obtenidas, previene problemas como plagas, estrés hídrico, estrés por nitrógeno, entre otros.
Tanto la teledetección como la fotogrametría moderna son ciencias (que si bien sus principios no se basan en el agro) de gran ayuda y utilidad en todo este tipo de procesos, aportando en todas las fases de un cultivo. Principalmente, a partir de técnicas apropiadas de interpretación del territorio, es posible determinar qué áreas son cultivables de acuerdo con el tipo de suelo y sus características y más aún se puede determinar en qué tiempos y qué tipo de cultivo es más apropiado en una zona predefinida; en la fase del cultivo se puede hacer un seguimiento y monitoreo de los cultivos con el fin de ver su comportamiento, en cada una de sus etapas, teniendo la posibilidad de tomar decisiones idóneas en momentos críticos que pudieran poner en riesgo la productividad y calidad de los cultivos.
Actualmente, es posible encontrar en el mercado imágenes satelitales gratuitas, drones de un costo no tan elevado y, del mismo modo, sensores más potentes y de precios más cómodos, de los cuales es posible extraer más información del espectro electromagnético y con resoluciones más precisas por banda, discriminando con mayor detalle el espectro visible, infrarrojos y térmicos, entre otros; así se posibilita la realización de composiciones y usos adecuados de estas bandas espectrales para precisar el estado actual del cultivo e identificar algunos tipos de problemáticas que sufren las plantas o de lo contrario estimar la posible productividad de la tierra a futuro.
Existe la necesidad hoy en día de mejorar servicios que integren la tecnología a procesos informales que muchas veces se presentan en el agro que, como se ha visto en el artículo, se traducen en sobrecostos, bajas en la productividad y procedimientos exhaustivos en los que muchas tareas pueden ser parametrizadas para que el productor no tenga que hacer tanto trabajo de campo y sea más productivo mejorando el rendimiento del mismo estudiando la totalidad de sus cultivos y capacitándose en tecnologías modernas que permiten identificar los procesos y estados de los campos.
Los drones tienen una gran ventaja y es su alta resolución a comparación de imágenes satelitales de open data. Como otro factor muy favorable se tiene que no presentan ningún conflicto con las nubes, un problema que en Colombia se da con mucha frecuencia en más del 70 % del territorio nacional; sin embargo, un factor que desfavorece la utilización de drones es la autonomía de vuelo, y esto reduce considerablemente la información capturada respecto del tiempo. No obstante, existen alternativas que aún no se han propuesto y que pueden mitigar esta deficiencia, y se relacionan directamente con a operatividad entre drones, como lo pueden ser redes inalámbricas para drones cumpliendo líneas y diseños de vuelo mejor parametrizados, para mayor cobertura y capacidad de maniobra en cuanto a los datos que se han de capturar.
Se ve la necesidad de que los actuales profesionales de las ciencias agropecuarias se apoyen en técnicas de percepción remota para validar todos los conocimientos que poseen y que muchas veces se evidencian en la fenología de las plantas. Es claro, que con un apropiado ejercicio y apropiación de estas técnicas se podría omitir en ocasiones el trabajo de campo, y llegar a soluciones inmediatas y de mayor precisión en estudios de cultivos particulares.
Referencias