Método para Medir Indirectamente la Velocidad de Fase en Sensores Surface Acoustic Wave
Indirect Method to Measure Phase Velocity in Surface Acoustic Wave Sensors
1 Leonardo Andrés Pérez, 2 Carlos Alberto Vera
1Laboratorio SIMME, Université Savoie Mont Blanc. Francia
2Universidad Nacional Abierta y a Distancia - UNAD, Escuela de Ciencia Básicas, Tecnología e Ingeniería- ECBTI, Bogotá D.C., Colombia
1perezcol@univ-savoie.fr 2carlos.vera@unad.edu.co
Resumen
El sensor de temperatura Surface Acoustic Wave (SAW) ofrece amplias posibilidades para ser utilizado en ambientes hostiles. En teoría, las mediciones del SAW se pueden leer inalámbricamente sin integrar circuitos electrónicos en su estructura, permitiendo funcionalidades en mediciones a muy altas temperaturas. La literatura reporta que las variaciones de temperatura del SAW ocasionan corrimientos en su frecuencia de sincronismo, efecto que se atribuye a la sensibilidad térmica de la velocidad de fase del substrato piezoeléctrico. Caracterizar apropiadamente el SAW requiere una buena medición de la velocidad de fase. No obstante, medir esta velocidad con respecto a la temperatura no es posible con la instrumentación actual. Este artículo reporta un método indirecto para medir estas variaciones de velocidad a través de simulaciones basadas en el Modelo de Mason y mediciones de la respuesta en frecuencia de un prototipo SAW. Identificar la velocidad de fase del SAW conlleva a graficar, con aceptable precisión, la curva de funcionamiento del sensor, la cual puede utilizarse posteriormente como curva de calibración.
Palabras clave: Modelamiento, ondas acusticas, sensor de temperatura, surface acoustic wave, velocidad de fase.
Abstract
The temperature sensor Surface Acoustic Wave (SAW) offers wide possibilities to be used in hostile environments. In theory, the measurements of the SAW can be read wirelessly without integrating electronic circuits in its structure, allowing functionality in measurements at very high temperatures. The literature reports that temperature variations of the SAW cause landslides in their frequency of synchronicity, effect that is attributed to the thermal sensitivity of the piezoelectric substrate phase velocity.
To characterize properly the SAW requires a good measurement of the speed of phase. However, to measure this speed with respect to the temperature is not possible with the current instrumentation. This paper reports an indirect method to measure these variations of speed through simulations based on the model of Mason, and measurements of the frequency response of a prototype SAW. Identifying the SAW phase velocity leads to plotting, with acceptable accuracy, the curve of the sensor operation which can then be used as a calibration curve.
Keywords: acoustic waves, modeling, speed of phase, surface acoustic wave, temperature sensor.
I. Introducción
Hoy en día muchos de los sensores de temperatura no pueden medir temperaturas extremas (superiores a 200°C) debido a que su transductor requiere estar conectado a un circuito electrónico (que puede incluir circuitos integrados, transistores y resistencias) el cual funciona erróneamente a temperaturas muy altas. Un claro ejemplo es la termocupla, un sensor de temperatura ampliamente disponible en el mercado el cual puede soportar el calor extremo pero su conexión por cable con una fuente de alimentación y otros circuitos electrónicos lo limitan en su operación. Otras soluciones fundamentadas en mediciones ópticas sin contacto, como los termómetros infrarrojos, son una alternativa que no proporciona una medida precisa de la temperatura porque el haz infrarrojo puede ser fácilmente perturbado por la luz externa. Además, tiene la desventaja de no tener un método estandarizado para su calibración en un rango amplio de temperaturas.
Una solución emergente se basa en la utilización de los dispositivos Surface Acoustic Wave (SAW), reportados como sensibles a los cambios de temperatura [1], [2], [3]. SAW opera a través de una onda acústica que se desplaza sobre la superficie de un substrato piezoeléctrico. Según la física de las ondas, los cambios de temperatura en el medio donde se propagan las ondas mecá- nicas modifican la velocidad de desplazamiento, también conocida como velocidad de fase. Este fenómeno físico también ocurre en los dispositivos SAW. La velocidad de fase de la onda acústica asociada al SAW cambia por la transferencia de calor desde un punto en el espacio hacia la superficie piezoeléctrica del dispositivo. Este fenómeno físico hace posible la utilización del SAW como sensor de temperatura en múltiples aplicaciones. Eléctricamente, las variaciones de la velocidad de fase se pueden detectar a través del corrimiento de la frecuencia de operación del dispositivo, también denominada frecuencia de sincronismo. Para ello, un circuito detector de fase eléctrica puede ser utilizado para extraer la información de la temperatura. La forma como el dispositivo puede ser interrogado inalámbricamente con la ventaja de no recurrir a la conexión de cables ni de circuitos eléctricos es detallada en [4], [5], [6].
En este artículo se propone un método indirecto para medir la velocidad de fase en función de la temperatura del SAW. El método se basa en la comparación de mediciones y simulaciones de la respuesta en frecuencia del dispositivo cuando se encuentra a una temperatura previamente definida. Para las mediciones, nuestro método requiere utilizar un dispositivo SAW. Para las simulaciones es suficiente emplear el modelo Mason Equivalent Circuit Model (MECM) [7]. Comparando los resultados y ajustando algunos parámetros del MECM es posible identificar rápidamente el valor de la velocidad de fase a una determinada temperatura. Esto permite construir la curva de respuesta del SAW la cual puede ser luego utilizada como la curva de calibración del dispositivo. Aplicaciones donde las mediciones a temperatura extrema son muchas, abarcando la profundidad de pozos petroleros, hornos metalúrgicos y turbinas aeroespaciales. En estos casos el dispositivo SAW tiene un fuerte potencial de aplicación.
II. surface acoustic wave y el efecto de la temperatura
A. Surface Acoustic Wave
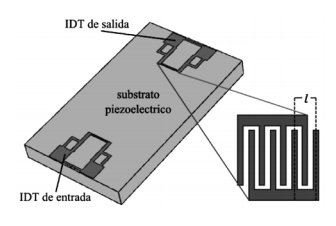
Un sensor de temperatura Surface Acoustic Wave está conformado por estructuras metálicas en forma de peines denominadas en inglés InterDigital Transducer (IDT), las cuales son depositadas sobre la superficie de un substrato piezoeléctrico. La figura 1 muestra la arquitectura de este dispositivo el cual está formado por dos estructuras IDT separadas, una para la señal de entrada y la otra para la salida. La distancia de separación entre ambos IDTs se conoce como lí- nea de retardo.
Figura 1. Estructura del SAW. La sección marcada con es el periodic length.
Cuando una señal eléctrica sinusoidal se aplica al IDT de entrada, el material piezoeléctrico transforma las variaciones del campo eléctrico en ondas acústicas que se propagan sobre la superficie. Cuando las ondas acústicas se desplazan y llegan al IDT de salida, estas se convierten en señales eléctricas para su posterior análisis.
En particular, la estructura completa del IDT está conformada por secciones periódicas conocidas en inglés como periodic length, las cuales se pueden observar en la figura 1. La longitud del periodic length define la frecuencia de operación del SAW, conocida, así mismo, como frecuencia de sincronismo Fs, que se expresa como:
Donde es la velocidad de fase, y es el periodic length. La amplitud de la respuesta en frecuencia del SAW siempre se aproxima a la función sinc2(x), donde su máximo corresponde con la frecuencia de sincronismo.
b. Relación frecuencia de sincronismo vs temperatura
Las ondas mecánicas del SAW son sensibles a diversos factores. La literatura reporta las modificaciones en la amplitud y la fase de la onda mecánica cuando se cambia la conductividad de la línea de retardo [8]. Abdollahi [9] especifica que las variaciones en la cantidad de masa ubicada sobre la línea de retardo ocasionan corrimientos de frecuencia. Slobodnik [12] hace énfasis en que la variación de temperatura en el substrato modifica la velocidad de fase de la onda. Estas variaciones ocasionadas por la temperatura han llevado a la realización de sensores de temperatura SAW para diversas aplicaciones [11], [12]. La gran ventaja que tiene el SAW respecto de otros sensores, es su capacidad de ser interrogado inalámbricamente. En caso de fabricarse con materiales como Langasite (La3Ga5SiO14) [13] para el substrato y aleaciones de Iridium-Rhodium para los IDT, el SAW podría soportar temperaturas hasta de 800°C sin necesidad de integrar un circuito electrónico en su estructura [14].
El Temperature Coeficient of Delay (TCD) es un parámetro del cristal piezoeléctrico que hace referencia a las variaciones de la propagación de la onda acústica con respecto a la temperatura [15]. Es decir, según la orientación del cristal piezoeléctrico y su temperatura, la onda acústica se propaga con mayor o menor velocidad desde el IDT de entrada hacia el IDT de salida. La ecuación (2) se utiliza para expresar las variaciones de la frecuencia de sincronismo con respecto a la temperatura:
De la ecuación (2) se evidencian dos fenómenos físicos que ocurren en el piezomaterial: el primer término de la resultante indica que existen variaciones de la velocidad de fase con respecto a la temperatura. En física de materiales, esta variación se denomina coeficiente térmico de la velocidad. El otro término hace referencia a las deformaciones por temperatura del material, las cuales corresponden con el coeficiente de dilatación térmica. En particular, el coeficiente térmico de la velocidad tiene mayor influencia en el SAW y, por consiguiente, la velocidad de fase será modificada en las simulaciones presentadas en la sección IV para su posterior medición.
III. Modelo Saw y Velocidad de Fase
A. Modelo del SAW
Actualmente, existen alternativas para modelar el SAW. Una de las más tradicionales es el MECM el cual representa el IDT, periodic length, por un circuito eléctrico compuesto por dos transformadores ideales unidos a redes T de impedancias complejas (ver figura 2).
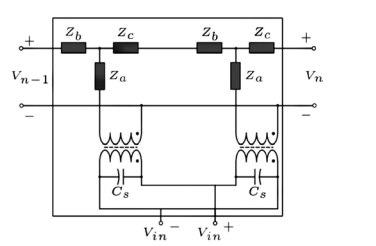
Fig. 2 Modelo MECM conformado por impedancias complejas y transformadores.
Las ecuaciones que corresponden con las impedancias complejas del MECM son las siguientes:
Donde Zm es la impedancia característica del SAW, y Ө es un ángulo trigonométrico que relaciona las frecuencias ligadas al modelo. Cs es la capacitancia estática de los IDTs, y K2 es la constante de acoplamiento electromecánico.
Para simular MECM es importante seleccionar un programa de computador que permita implementar las impedancias complejas. A través de PSPICE es posible llevar a cabo la simulación.
b. Método para medir la velocidad de fase
Aquí se presenta un método para estimar la velocidad de fase del SAW superponiendo las respuestas en frecuencia de un prototipo SAW y la simulación a través del MECM. Los pasos por seguir para medir la velocidad de fase del dispositivo SAW son las siguientes:
1) Obtenga las dimensiones de la línea de retardo y el periodic length del prototipo SAW. Simule el prototipo SAW utilizando el modelo MECM y obtenga la respuesta en frecuencia. Para ello, identifique previamente las constantes del modelo y reemplace su valor en la simulación.
2) Por medio de un analizador de redes, mida la respuesta en frecuencia cuando el dispositivo SAW tiene un nivel de temperatura estable. Extraiga los datos obtenidos.
3) Dentro de una misma gráfica de bode, grafique la respuesta en frecuencia de la medición y la respuesta de la simulación.
4) Re-ejecute la simulación ajustando el valor de la velocidad de fase hasta que la respuesta en frecuencia de la simulación y del modelo se superpongan con aceptable aproximación.
5) Luego del ajuste, se llega al valor real de la velocidad de fase del prototipo SAW.
6) De la curva de simulación, identifique la frecuencia central que es igual a la frecuencia de sincronismo.
El procedimiento modifica la velocidad de fase porque según la ecuación (2), este parámetro varía de acuerdo con la temperatura.
IV. Mediciones y Resultados
En esta sección se presentan las mediciones que se llevaron a cabo siguiendo los pasos previamente indicados para encontrar la velocidad de fase. Para ello, se establece un valor de temperatura (21°C) para el dispositivo SAW. Con los resultados también se demuestra que, efectivamente, la velocidad de fase es dependiente de la temperatura del substrato piezoeléctrico.
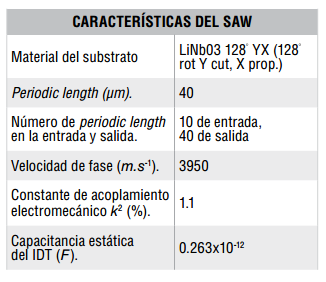
Las dimensiones, propiedades mecánicas y eléctricas del prototipo SAW utilizado en los experimentos se presentan en la tabla 1. Para medir la respuesta en frecuencia del dispositivo se utilizó el analizador de redes Agilent E5061B. El equipo se configuró para medir un barrido de frecuencias desde 80MHz hasta 105 MHz.
TABLA I
Propiedades del Saw Utilizado en las Pruebas
El MECM se implementó en PSPICE donde se definieron sus constantes derivadas de la tabla 1. En la estructura del programa, primero se genera código para un MECM, conformado por la red T de impedancias complejas que luego son conectadas a los transformadores. A continuación se presenta el código que genera la red T:
.SUBCKT TNET A B C % Red T de impedancias complejas
XA B 1 TANEQ
XB C 1 TANEQ
XC A 1 CSCEQ
.ENDS
.SUBCKT TANEQ A B PARAMS: Cs={0.263E-12}
L={40E-6} Vs={3950} K={0.011}
.PARAM Ro={L/(Vs*Cs*K)}
Vtg A 1 DC 0
Etg 1 B LAPLACE {I(Vtg)}={(-Ro*SQRT(- (S*S))*TAN((SQRT(-(S*S))*L)/(4*Vs)))/S}
.ENDS
.SUBCKT CSCEQ A B PARAMS: Cs={0.263E-12} L={40E-6} Vs={3950} K={0.011}
.PARAM Ro={L/(Vs*Cs*K)}
Rcc A 1 1E-6
Vcc 1 2 DC 0 Ecc 2 B LAPLACE {I(Vcc)}={(Ro*SQRT(-(S*S)))/ (S*SIN((SQRT(-(S*S))*L)/(2*Vs)))}
.ENDS
Luego de generar un MECM que corresponde con un periodic length, se multiplica este modelo hasta crear la totalidad de electrodos. Nuestro dispositivo es conformado por 10 IDT de entrada y 40 IDT de salida.
La figura 3A muestra en un único plot las respuestas en frecuencia de la simulación y de la medición del prototipo SAW. En particular, se observa un gap o corrimiento en frecuencia entre la curva marcada como simulación 1 y la curva de medida en una zona cercana a la frecuencia de sincronismo. Este gap se debe a que la velocidad de fase en la simulación no corresponde con la velocidad real del prototipo SAW. Siguiendo con el método propuesto, se ajustó el valor de velocidad de fase en el modelo recurriendo a la ecuación (6). La figura 3B muestra como la curva de simulación, ahora llamada simulación 2, se superpone con aceptable aproximación a la curva de medida. En este punto ya se ha hecho el ajuste de la velocidad de fase y su valor en el prototipo SAW es de 3886 m/s a 21°C. Si se cambia la temperatura del prototipo, cambiará también esta velocidad, y con el método presentado se puede volver a calcular su valor.
Es importante notar que la simulación del prototipo SAW a través del MECM permite también identificar visualmente la frecuencia de sincronismo. En la figura 3B se observa que cerca del valor máximo de la curva de medida se ubica la unión entre dos lóbulos obtenidos en la simulación MECM. Visualmente se puede identificar esta unión, y su posición en el eje de las frecuencias corresponde con la frecuencia de sincronismo.
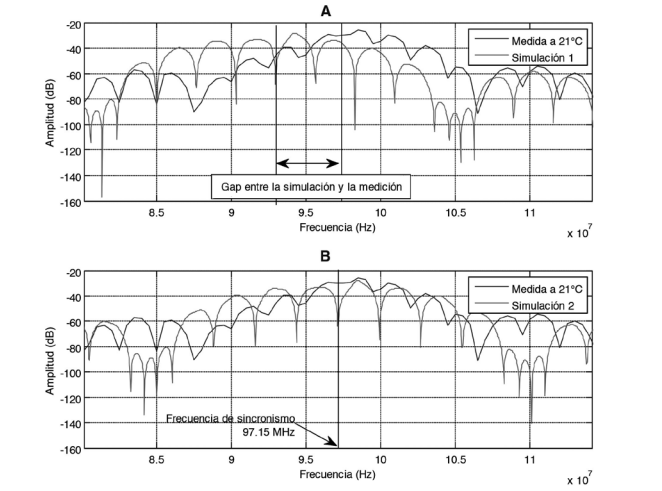
Fig. 3 Respuestas en frecuencias de la simulación y las mediciones del dispositivo SAW. A) La curva de simulación 1 tiene un valor aleatorio de la velocidad de fase, y por consiguiente, existe un gap o corrimiento con respecto a la medida. B) Luego de ajustar la velocidad de fase la curva de simulación 2, la cual es igual a la curva de simulación 1, se superpone con la medida y de esta forma se identifica el valor de la frecuencia de sincronismo.
V. Conclusiones
El método propuesto permite rápidamente medir indirectamente la velocidad de fase en sensores de temperatura SAW. El método requiere de simulaciones del MECM y mediciones con un dispositivo SAW bajo prueba. Es importante determinar en un comienzo las constantes del modelo, las cuales se derivan de las propiedades y dimensiones del substrato y los IDTs. El método también permite identificar gráficamente la verdadera frecuencia de sincronismo.
Para generar la curva de calibración del sensor, basta con dibujar una gráfica teniendo como abscisa la temperatura y como ordenada la velocidad de fase. La interpolación de los puntos de esta curva puede tener una distribución aleatoria y, por consiguiente, se requerirá de métodos estadísticos, como los mínimos cuadrados, para definir la curva que mejor se aproxime a las medidas.
Referencias
[1] B. Drafts, “Acoustic Wave Technology Sensors” IEEE Transaction on Microwave Theory and Techniques, vol. 49, No. 4, April 2001, pp. 795-802.
[2] B. Zhang, H. Hu, A. Ye and F. Cao, “A Surface Acousitic Wave Resonator Type Sensor for Measuring Temperature” International Conference on Computer Science and Mechanical Automation, 2015, pp. 162-165.
[3] R.M. White. Surface elastic waves. Proceedings of the IEEE 58,418 1238–1276, 1970.
[4] A. Pohl and F. Seifert, “Wirelessy interrogable surface acoustic wave sensors for vehicular applications” IEEE Transaction on Instrumentation and Measurement, vol. 46, August 1997, pp. 1031-1038.
[5] W. Bulst, G. Fischerauer and L. Reindl, “State of the art in wireless sensing with Surface Acoustic Waves” IEEE Transaction on Instrumentation and Measurement, vol. 48, April 2001, pp. 265-271.
[6] L Reindl, I. Shrena, S. Kenshil and R. Peter, “Wireless measurement of temperature using surface acoustic waves sensors” Proceedings of the 2003 IEEE International, May 2003, pp.935 -941.
[7] W.P.Mason, Electromechanical Transducers and wave filters”, D.Van Nostrand Co., (1948) pp. 201-209, 399-409.
[8] A. J. Ricco, S. J. Martin, T.E. Zipperian, “Conductividad. Surface acoustic wave gas sensor based on film conductivity changes”, Sensors and Actuators, vol. 8, December 1985, pp. 319-333.
[9] A. Abdollahi, Z. Jiang and S. Arabshahi, “Evaluation on mass sensitivy of SAW sensors for different piezoelectric materials using finite-elements analysis” IEEE Transaction on Ultrasonics, Ferroelectrics, and Frequency Control vol. 54, December 2007, pp. 2446-2455.
[10] J. Michael and Vellekoop, “Acoustic Wave sensor and their technology” Ultrasonics International 1997, Elsevier, vol. 36, Feb 1999, pp. 7-14.
[11] J. Hornsteiner, E. Born, G. Fischerauer, E. Riha, “Surface Acoustic Wave sensors for high -temperature applications”, Frequency Control Symposium, Proceedings of the 1998 IEEE International, pp.615-620.
[12] A. Slobodnik, Andrew J. ”Surface acoustic waves and SAW materials.”443 Proceedings of the IEEE 64.5, 1976, pp. 581-595.
[13] M. Pereira da Cunha, “High temperature stability of langasite surface acoustic wave devices”, 2008 IEEE Ultrasonics Symposium, November 2008, pp. 205-208.
[14] A. Taguett, ”Synthèse et étude thermodynamique d’alliages Ir/Rh à l’état massif et en films minces pour la réalisation de capteurs SAW fonctionnant à haute température (700°C-1000°C) dans l’air”. Projet de thè- se en Sciences Pour l’Ingénieur, 2015. pp. 2-4.
[15] J. Fleming, The Temperature Coeficient of DelayTime for X-Propagating Acoustic Surface Waves on Rotated Y-Cuts of Alpha Quartz, IEEE Transactions Vol. SU-22, 1975 pp. 1-4.